National Science Foundation - Auburn, Alabama
May 2021 - July 2021
Undergraduate Research Assistant - Auburn University

Autonomous navigation of Unmanned Aerial Vehicles (UAVs) has become an increasingly popular area of study as technology has advanced over the years. One technology that has been developed for use in the autonomous navigation of UAVs is fiducial markers. Fiducial markers are a type of physical tag that can be placed in an environment to assist with UAV localization, navigation, and landing. A UAV can identify and scan a fiducial marker with an onboard camera and take appropriate action based on the data received from the marker. Previous research using only fiducial markers and onboard sensors for UAV navigation in a GPS-denied environment requires the camera to have constant visual contact with at least one marker. This paper explores the use of fiducial markers for outdoor UAV navigation in a GPS-denied environment without the restriction of constant visual contact with a marker. Physical implementation and formal methods are used to study the performance and overall viability of this solution.
 Zachary Schallenberger
Zachary Schallenberger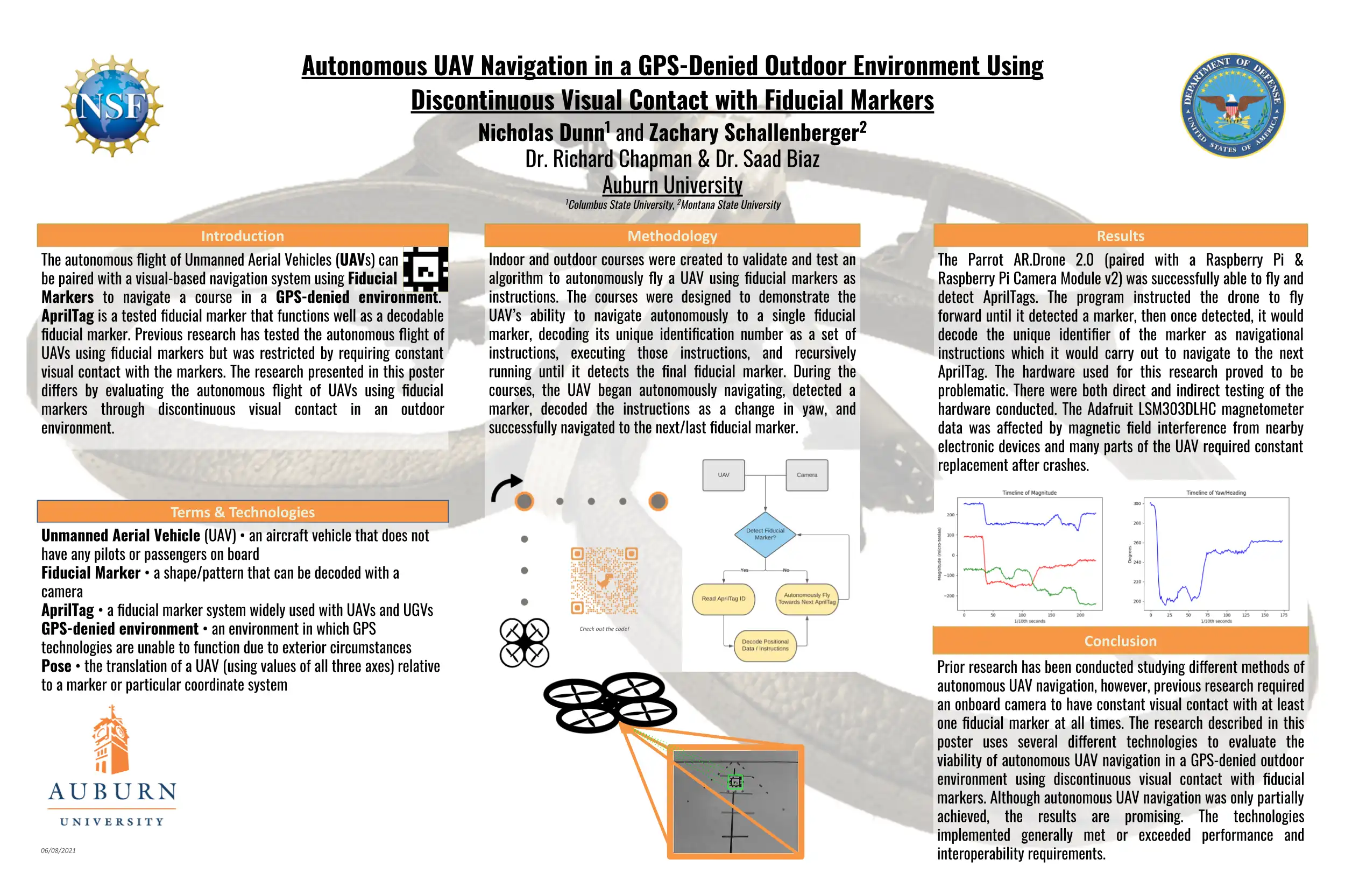

The autonomous flight of Unmanned Aerial Vehicles (UAVs) can be paired with a visual-based navigation system using Fiducial Markers to navigate a course in a GPS-denied environment. AprilTag is a tested fiducial marker that functions well as a decodable fiducial marker. Previous research has tested the autonomous flight of UAVs using fiducial markers but was restricted by requiring constant visual contact with the markers. The research presented in this poster differs by evaluating the autonomous flight of UAVs using fiducial markers through discontinuous visual contact in an outdoor environment.

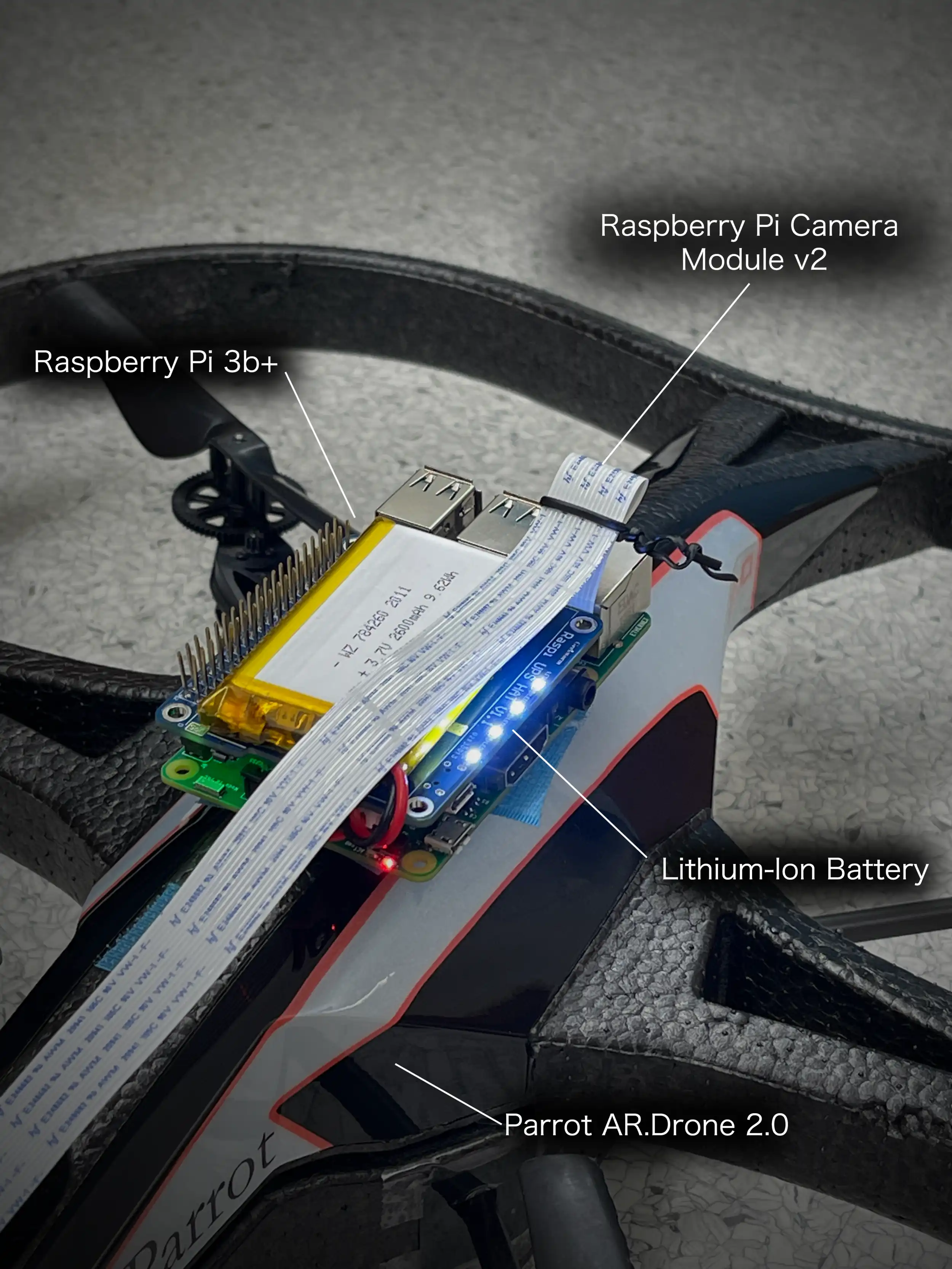
To develop a system for autonomous navigation of UAVs using only fiducial markers and onboard sensors, without the requirement of continuous detection of a marker, a suitable marker system, AprilTag, was selected. After selecting a fiducial marker system, a Raspberry Pi 3B with a Raspberry Pi Camera Module v2 was obtained and a Python program was developed to detect the AprilTags. Next, two markers were printed, and experiments were conducted to detect them with the Raspberry Pi camera. The next step was to select a UAV to use for the research: the Parrot AR.Drone 2.0. After selecting the drone, several Python programs were developed to control the drone’s movements, onboard sensors, and cameras. Several flights were then successfully executed using the programs. Next, the Raspberry Pi was mounted onto the UAV and the camera was positioned towards the front of the UAV at a downward-facing angle. Python programs were later developed and tested to align the UAV with a detected fiducial marker. A program was developed to navigate the UAV from one marker to the next using only onboard sensors to minimize drift errors. Finally, the previously computed position of each marker with respect to the previous marker was stored as data with the previous marker, so that each time the UAV arrived at a marker, it read in the positional data of the next marker and adjusted its heading to navigate in a straight-line path to the next marker.
The Parrot AR.Drone 2.0 (paired with a Raspberry Pi & Raspberry Pi Camera Module v2) was successfully able to fly and detect AprilTags. The program instructed the drone to fly forward until it detected a marker, then once detected, it would decode the unique identifier of the marker as navigational instructions which it would carry out to navigate to the next AprilTag. The hardware used for this research proved to be problematic. There were both direct and indirect testing of the hardware conducted. The Adafruit LSM303DLHC magnetometer data was affected by magnetic field interference from nearby electronic devices and many parts of the UAV required constant replacement after crashes.

Prior research has been conducted studying different methods of autonomous UAV navigation, however, previous research required an onboard camera to have constant visual contact with at least one fiducial marker at all times. The research described in this poster uses several different technologies to evaluate the viability of autonomous UAV navigation in a GPS-denied outdoor environment using discontinuous visual contact with fiducial markers. Although autonomous UAV navigation was only partially achieved, the results are promising. The technologies implemented generally met or exceeded performance and interoperability requirements.